Motivation Illustration: VLA and VA policies are powerful but rely on costly large-scale training. Theoretically, we show that combining distributional scores of pre-trained policies can yield a single-step error drop that propagates stably along the overall trajectory, enabling General Policy Composition (GPC) --- a training-free method to boost policy performance via convex combination. GPC is versatile, allowing for the plug-and-play composition of heterogeneous policies, including VA and VLA models, as well as those based on diffusion or flow-matching, irrespective of their input visual modalities.
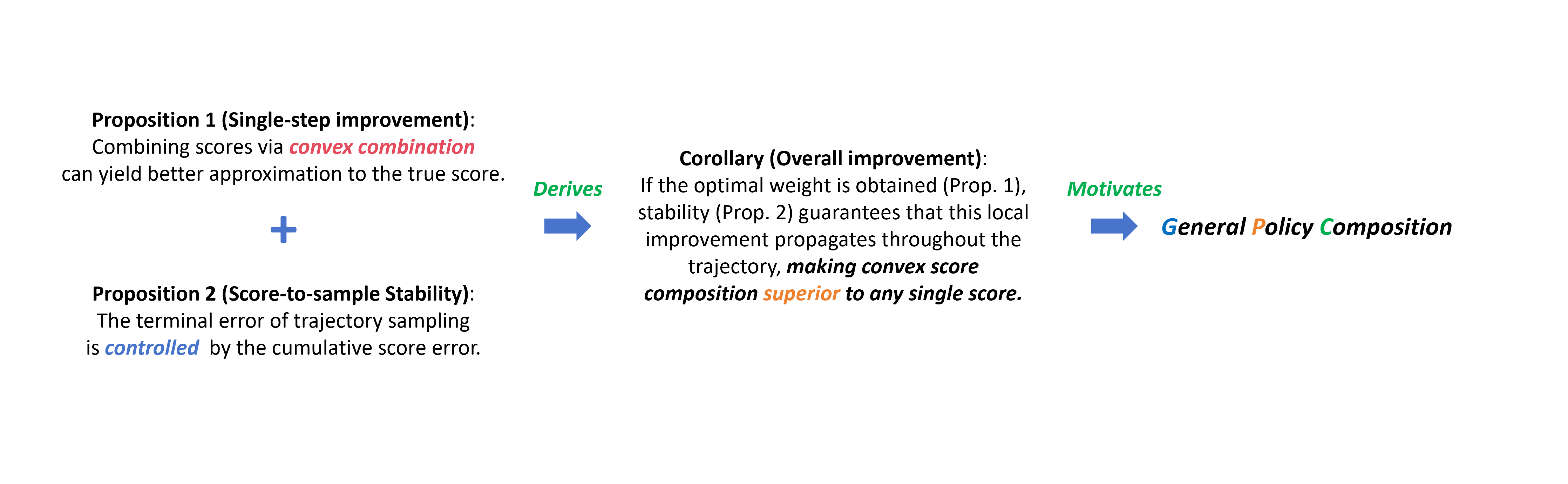
cOverview of Mathematics Foundation: We provide a high-level description of the math foundation of General Policy Composition framework, outlining how function-level (single step improvement) and system-level (overall trajectory improvement) analyses together motivate our approach.
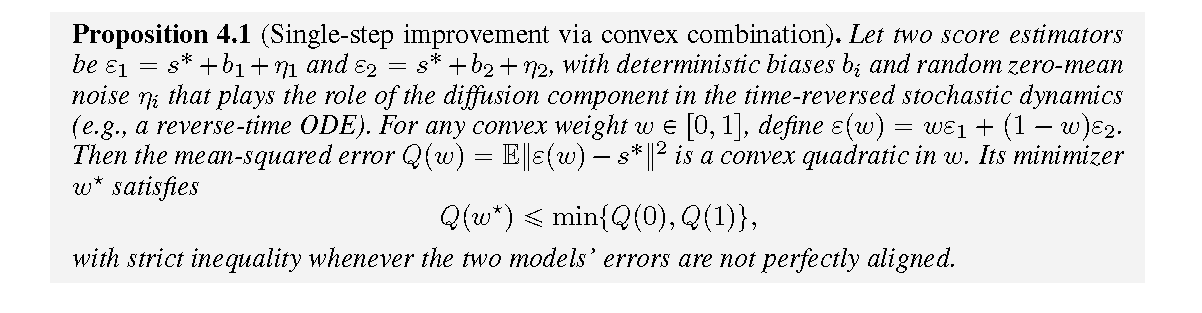
Proposition 1 establishes that a proper convex combination of distributional scores can yield a smaller single-step error than either individual score estimator.
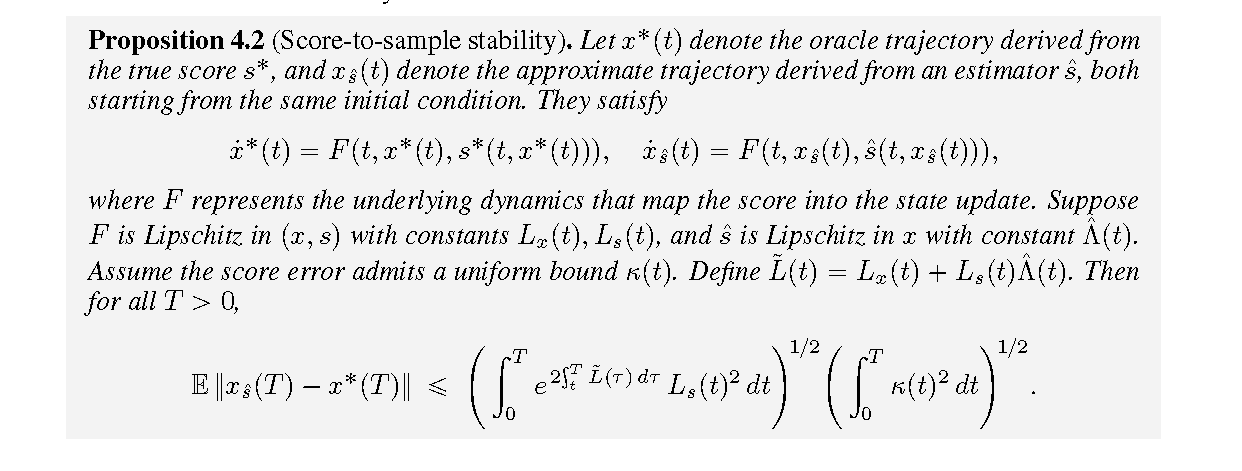
Proposition 2 leverages a Grönwall-type inequality to show that the terminal error grows at most exponentially with the Lipschitz constants, and is directly bounded by the integrated score error.
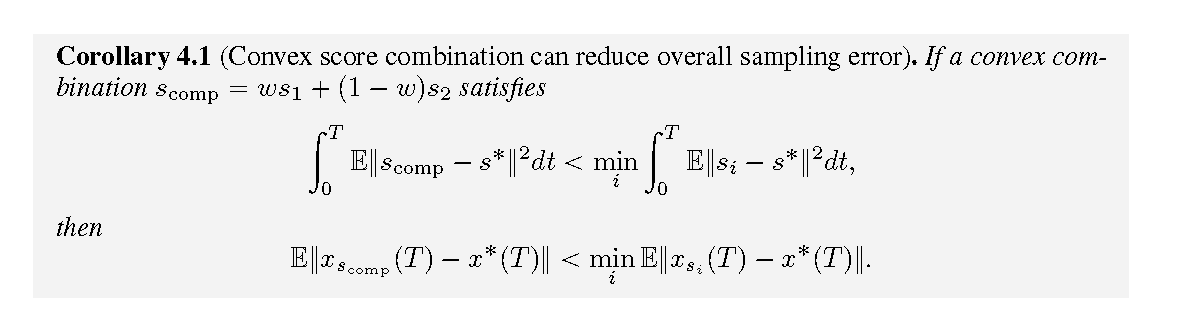
Corollary 1. Once functional-level improvement is established by obtaining an optimal weight (Prop. 4.1), stability ensures this advantage propagates along the trajectory (Prop. 4.2), making convex score composition provably superior to relying on individual scores.
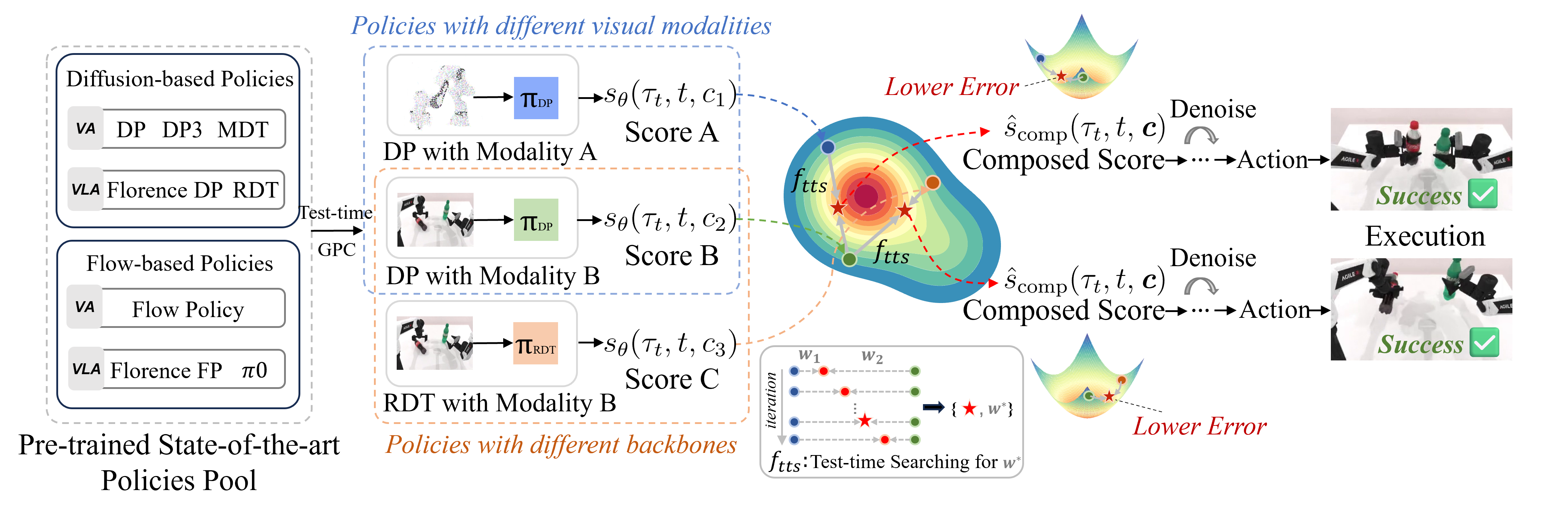
Overview of our proposed General Policy Composition. Combining distributional scores from pre-trained diffusion-based or flow-based policies on different conditions (e.g., visual modalities and network backbones), GPC can generate expressive and adaptable action trajectories through convex score combination without additional training.
Experiemnt Settings: There are two variations and we run 200 trials for each variation: (1) Base Diffusion-based and Flow-based Policies (e.g., DP, Flow Policy, Pi-0). The policies are pre-trained based on their original codebase. (2) Composed Policies via GPC. Composed policies are combined via GPC during test-time.
Score Metric: We calculate the average success rate.
TABLE I: Experiment results on Robomimic and PushT.
The table shows the success rate ↑. Our GPC yields a noticeable average improvement compared with the base policies.
| Method | Generative Mode | Model Type | Robomimic | PushT | Average | ||
|---|---|---|---|---|---|---|---|
| Can | Lift | Square | PushT | Avg. | |||
| Base Policies | |||||||
| Diffusion Policy (DP) | Diffusion | VA | 34.50 | 98.50 | 2.00 | 21.75 | 39.19 |
| Mamba Policy (MP) | Diffusion | VA | 5.00 | 98.50 | 3.00 | 12.06 | 29.64 |
| Flow Policy (FP) | Flow Matching | VA | 95.00 | 13.00 | 77.50 | 54.25 | 59.94 |
| Florence Policy-D | Diffusion | VLA | 61.50 | 97.00 | 46.50 | 40.00 | 61.25 |
| Florence Policy-F | Flow Matching | VLA | 89.00 | 98.50 | 88.50 | 39.38 | 78.84 |
| π0 | Flow Matching | VLA | 96.50 | 99.00 | 92.50 | 57.69 | 86.42 |
| Composed Policies via Convex Score Combination | |||||||
| DP + MP | Diffusion | VA & VA | 34.50 | 99.50 | 8.00 | 23.63 | 41.41 (+2.22%) |
| Florence-Policy-D + DP | Diffusion | VLA & VA | 62.50 | 100.00 | 61.50 | 43.06 | 66.76 (+5.51%) |
| Florence-Policy-D + MP | Diffusion | VLA & VA | 63.00 | 100.00 | 54.50 | 40.88 | 64.60 (+3.35%) |
| Florence-Policy-F + FP | Flow Matching | VLA & VA | 98.50 | 98.50 | 92.50 | 56.06 | 86.39 (+7.55%) |
| π0 + FP | Flow Matching | VLA & VA | 99.50 | 100.00 | 94.00 | 62.25 | 88.94 (+2.52%) |
Experiemnt Settings: There are two variations and we run 100 trials for each variation: (1) Base Diffusion-based Policies (e.g., DP, DP3, RDT). (2) Composed Policies via GPC.
Score Metric: We calculate the average success rate.
Table II: Experiment results on RoboTwin with 6 diverse bimanual manipulation tasks.
GPC achieves an obvious increase with up to 7% improvement on the success rate.
| Method | Model Type | Hanging Mug | Open Laptop | Place Burger Fries | Put Object Cabinet | Stack Bowls Three | Turn Switch | Average |
|---|---|---|---|---|---|---|---|---|
| Base Policies | ||||||||
| DPimg | VA | 0.10 | 0.74 | 0.49 | 0.56 | 0.52 | 0.38 | 0.46 |
| DPpcd | VA | 0.21 | 0.93 | 0.72 | 0.71 | 0.64 | 0.71 | 0.65 |
| RDT | VLA | 0.13 | 0.69 | 0.46 | 0.32 | 0.47 | 0.30 | 0.40 |
| Composed Policies via Convex Score Combination | ||||||||
| DPimg + DPpcd | VA & VA | 0.23 | 0.93 | 0.78 | 0.82 | 0.71 | 0.71 | 0.70 (+5%) |
| RDT + DPimg | VLA & VA | 0.18 | 0.80 | 0.57 | 0.59 | 0.66 | 0.38 | 0.53 (+7%) |
| RDT + DPpcd | VLA & VA | 0.36 | 0.94 | 0.83 | 0.78 | 0.73 | 0.71 | 0.72 (+7%) |
Experiemnt Settings: There are two variations and we run 20 trials for each policy for evaluation: (1) Base Diffusion-based Policies (e.g., DP, DP3). (2) Composed Policies via GPC.
Experiemnt Settings: There are three variations and we run 100 trials for each policy for evaluation: (1) Base Diffusion-based VA and VLA Policies (i.e., DP, DP3 and RDT). (2) Composed Policies via GPC.
To analyse how do different weight configurations influence the performance of GPC across various scenarios, we evaluate GPC performance across multiple tasks under different weight configurations as follows.
Table III: Experiment results of our method under different composition configurations.
These results highlight GPC's versatility and the importance of weight tuning across policies.
| Scenario | Task | DPimg | DPpcd | Weight Scheduling in GPC (weight of DPimg) | Δ | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.1* | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | |||||
| Both Policies Perform Well |
Empty Cup Place | 0.42 | 0.62 | 0.70 | 0.86 | 0.84 | 0.86 | 0.84 | 0.84 | 0.76 | 0.68 | 0.61 | +24% |
| Dual Bottles Pick (Hard) | 0.49 | 0.64 | 0.69 | 0.63 | 0.71 | 0.66 | 0.64 | 0.65 | 0.63 | 0.56 | 0.58 | +7% | |
| Shoe Place | 0.37 | 0.36 | 0.47 | 0.52 | 0.56 | 0.59 | 0.60 | 0.59 | 0.59 | 0.53 | 0.41 | +23% | |
| Both Policies Perform Bad |
Dual Shoes Place | 0.08 | 0.23 | 0.19 | 0.17 | 0.19 | 0.20 | 0.20 | 0.17 | 0.16 | 0.14 | 0.09 | +0% |
| Pick Apple Messy | 0.05 | 0.26 | 0.25 | 0.17 | 0.21 | 0.15 | 0.13 | 0.08 | 0.08 | 0.06 | 0.08 | +0% | |
| Policy A > Policy B | Dual Bottles Pick (Easy) | 0.77 | 0.36 | 0.52 | 0.64 | 0.70 | 0.75 | 0.82 | 0.81 | 0.80 | 0.85 | 0.80 | +8% |
| Policy A < Policy B | Block Hammer Beat | 0.00 | 0.76 | 0.61 | 0.30 | 0.18 | 0.15 | 0.12 | 0.07 | 0.00 | 0.00 | 0.00 | +0% |
* The number set {0.1, …, 0.9} denotes the weight of DPimg (w1), corresponding to the noise estimation of GPC as
ε̂M* = w₁·εDP_img + w₂·εDP_pcd.
When w₁ = 0.0 or 1.0, GPC degenerates into DPpcd or DPimg, respectively.
Several findings are summarized:
 Finding 1:
When both policies have moderate accuracy (e.g., >30%),
GPC often achieves higher accuracy under appropriate weight configurations compared to base policies.
This improvement reflects the composition of diffusion scores capturing a more generalized distribution that
reduces reliance on specific conditions, consistent with the theoretical advantages of compositional models.
Finding 1:
When both policies have moderate accuracy (e.g., >30%),
GPC often achieves higher accuracy under appropriate weight configurations compared to base policies.
This improvement reflects the composition of diffusion scores capturing a more generalized distribution that
reduces reliance on specific conditions, consistent with the theoretical advantages of compositional models.
Finding 2:
When one policy has significantly lower accuracy, GPC struggles to surpass the highest accuracy of the better-performing base policies.
This suggests that low-accuracy scores from weaker modalities can significantly affect the joint distribution,
diminishing the overall performance of the composed policy.
Finding 3:
The improvement of GPC is always maximized when the better-performing base policy holds a larger weight in GPC.
This highlights the necessity of assigning higher weights to the better-performing distribution to maximize the effectiveness of GPC,
guiding the composed policy toward consensus.
These findings highlight GPC's versatility in leveraging the strengths of different conditions and the importance of appropriately tuning weights to each policy's performance.
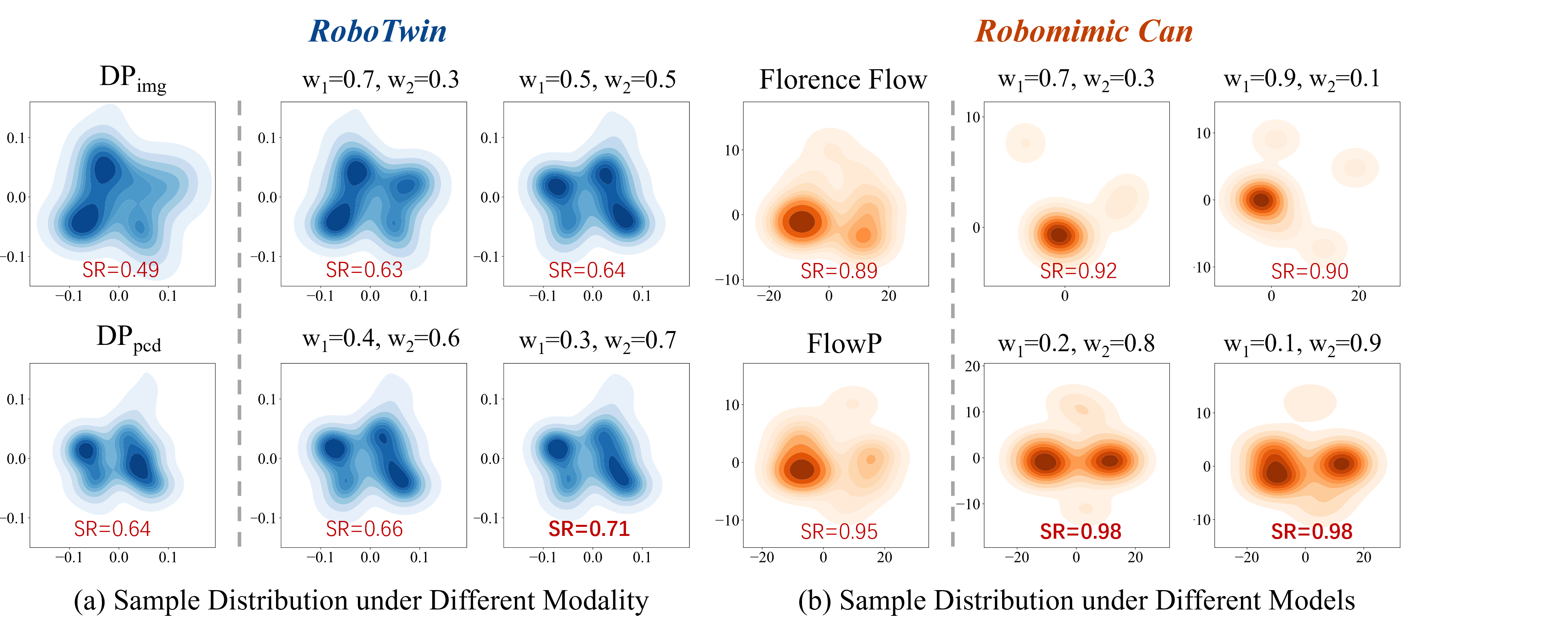
Visual Analysis of GPC under Different Compositions. GPC generalizes across (a) modalities and (b) architectures, with appropriate weighting yielding accurate distributions with better SR than individual policies.
@article{cao2025gpc,
title={Compose Your Policies! Improving Diffusion-based or Flow-based Robot Policies via Test-time Distribution-level Composition},
author={Jiahang Cao and Yize Huang and Hanzhong Guo and Rui Zhang and Mu Nan and Weijian Mai and Jiaxu Wang and Hao Cheng and Jingkai Sun and Gang Han and Wen Zhao and Qiang Zhang and Yijie Guo and Qihao Zheng and Chunfeng Song and Xiao Li and Ping Luo and Andrew F. Luo},
journal={arXiv preprint arXiv:2510.01068},
year={2025},
url={https://arxiv.org/abs/2510.01068},
}